I received my Ph.D. in Mechanical Engineering from the University of Washington in June 2026. My research focuses on Robotics, Motion Planning & Control, Tactile Sensing, and Vision-Language Models for Robot Reasoning. I received my B.Eng. from Zhejiang University in 2021, where I was part of the Chu Kochen Honors College.
University of Washington, Seattle, WA Ph.D. in Mechanical Engineering (Sep 2021 - June 2026) M.S. in Mechanical Engineering & Minor in Data Science (2023) | GPA: 3.91/4.0
Zhejiang University, Hangzhou, China B.Eng. in Biosystems Engineering (Sep 2017 - July 2021) Chu Kochen Honors College | Advanced Honor Class of Engineering Education (ACEE)
Technical University of Munich, Munich, Germany Exchange Student, Mechanical Engineering (Oct 2019 - Mar 2020)
💼 Experience
Google - Student Researcher (Robotics & Embodied AI) Mountain View, CA | Sep 2025 - Dec 2025 Sim-to-Real RL for humanoid robot and object interaction, VLM reasoning with Gemini, XR Perception
Western Digital - Electrical & Firmware Engineering Intern San Jose, CA | June 2024 - Sep 2024, June 2025 - Sep 2025 System identification for HDD servo, Youla-Kucera loop-shaping controller design
Futronics (UBTECH Robotics North America) - Robotics & Control Engineer Intern Los Angeles, CA | Jan 2025 - March 2025 Learning Based Trajectory optimization for rehabilitation upper limb exoskeleton
ARHumanoid: Semantic Skill Grounding for Whole-Body Control on a Real Humanoid
Xiaohai Hu, Bruce Huang, Xiao Chen, Yang Chen, Xu Chen, Sean Yuan, Luke Jia, Chao Guo
ARHumanoid converts monocular human videos into contact-feasible whole-body skills on the Unitree G1, combining geometric contact correction, domain-randomized reinforcement learning, and an AR-mounted multimodal LLM that selects skills from egocentric RGB while keeping the high-frequency motor loop purely proprioceptive and low-latency.
Trajectory Optimization and Assessment for an Underactuated 4-DOF Upper Limb Exoskeleton Rehabilitation Robot
Xiaohai Hu, Zhengyang Xu, Thomas Chu, Xu Chen
ASME Letters in Dynamic Systems and Control, under review
We formulate full-horizon trajectory optimization for an underactuated 4-DOF upper-limb rehabilitation exoskeleton, jointly optimizing tracking accuracy and smoothness with exact gradients via automatic differentiation and warm-start initialization.
Learned Slip-Detection-Severity Framework Using Tactile Deformation Field Feedback for Robotic Manipulation
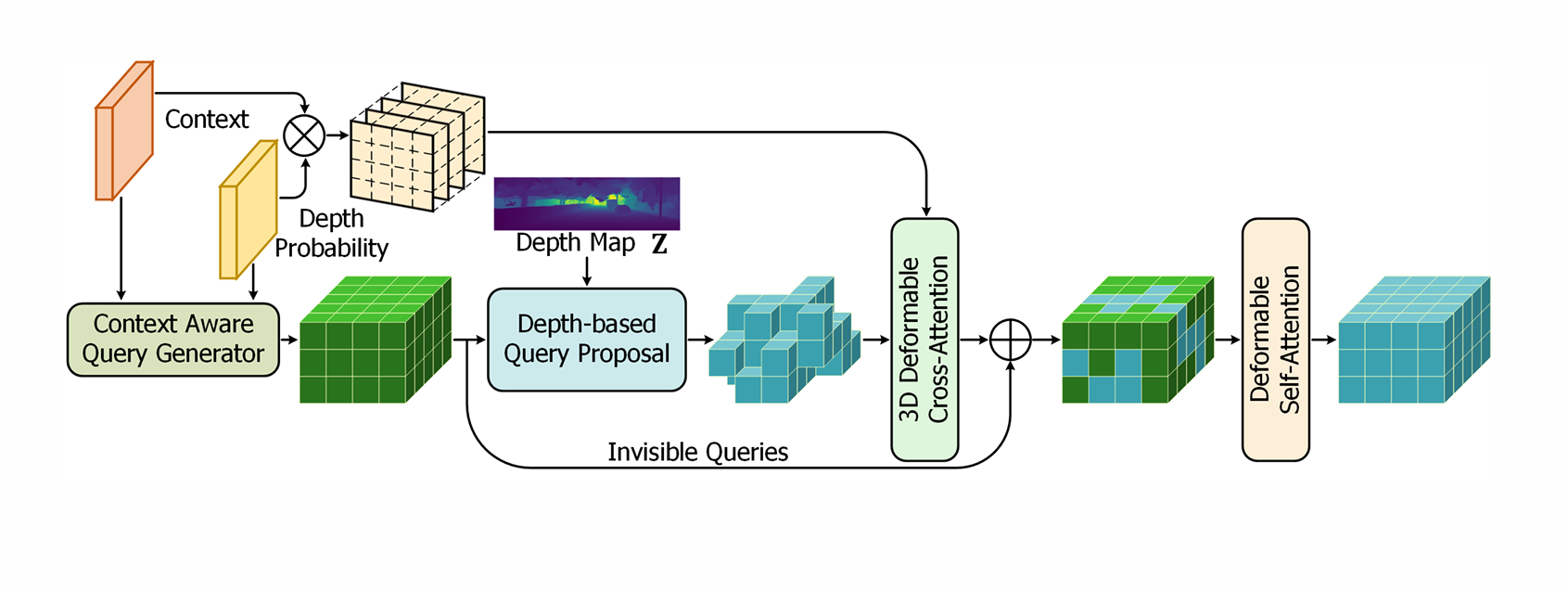
A novel context and geometry aware voxel transformer that initializes context-dependent queries and extends deformable cross-attention to 3D pixel space for semantic scene completion.
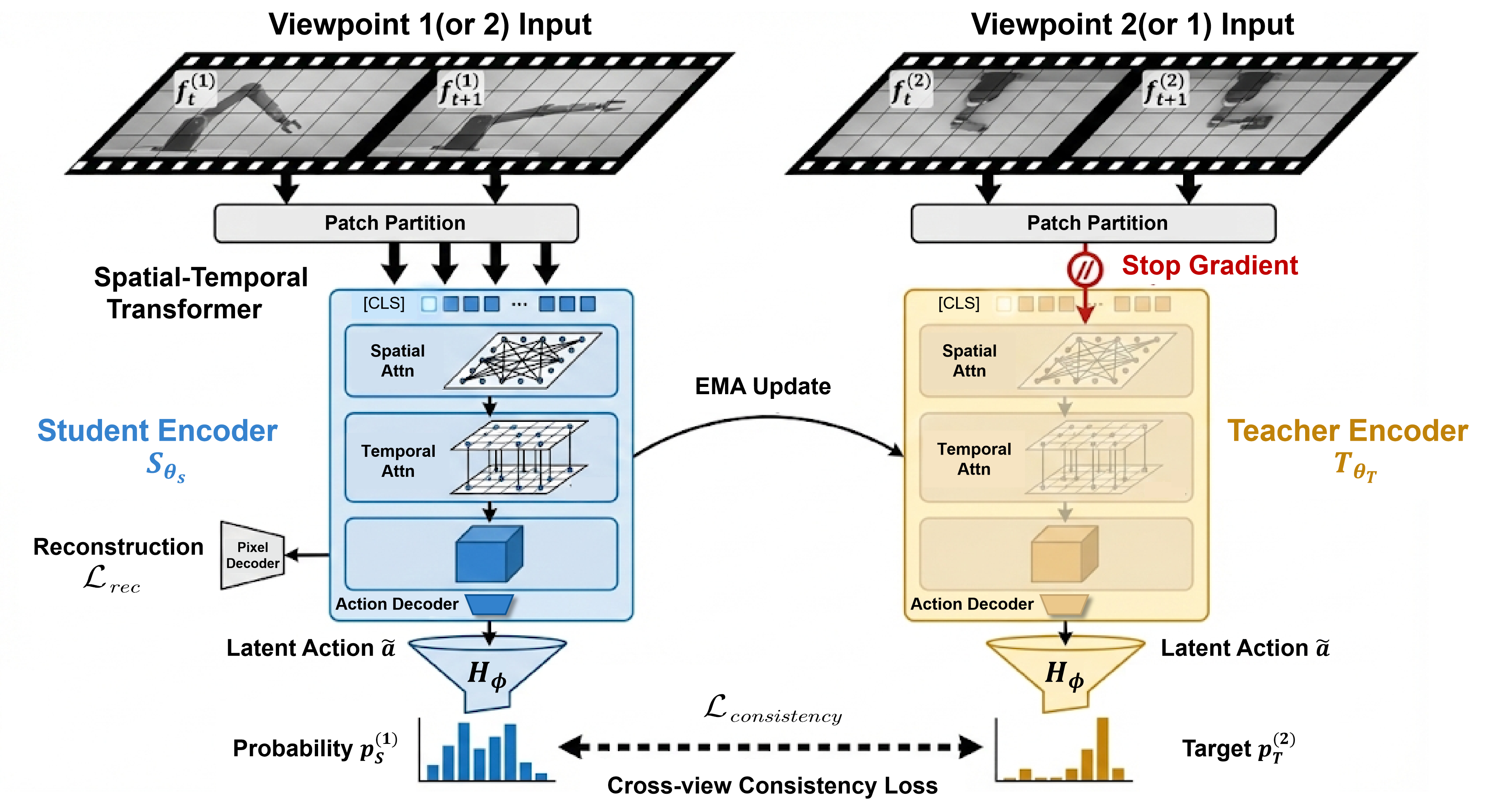
Multi-view Consistent Latent Action Learning for World Modeling and Control
Shenghua Wan, Xiaohai Hu, Xunlan Zhou, Lei Yuan, Le Gan, De-Chuan Zhan
International Conference on Machine Learning (ICML), accepted, 2026
MuCoLA learns robust, view-invariant action representations by enforcing semantic consistency across synchronized video streams via DINO-style self-distillation.
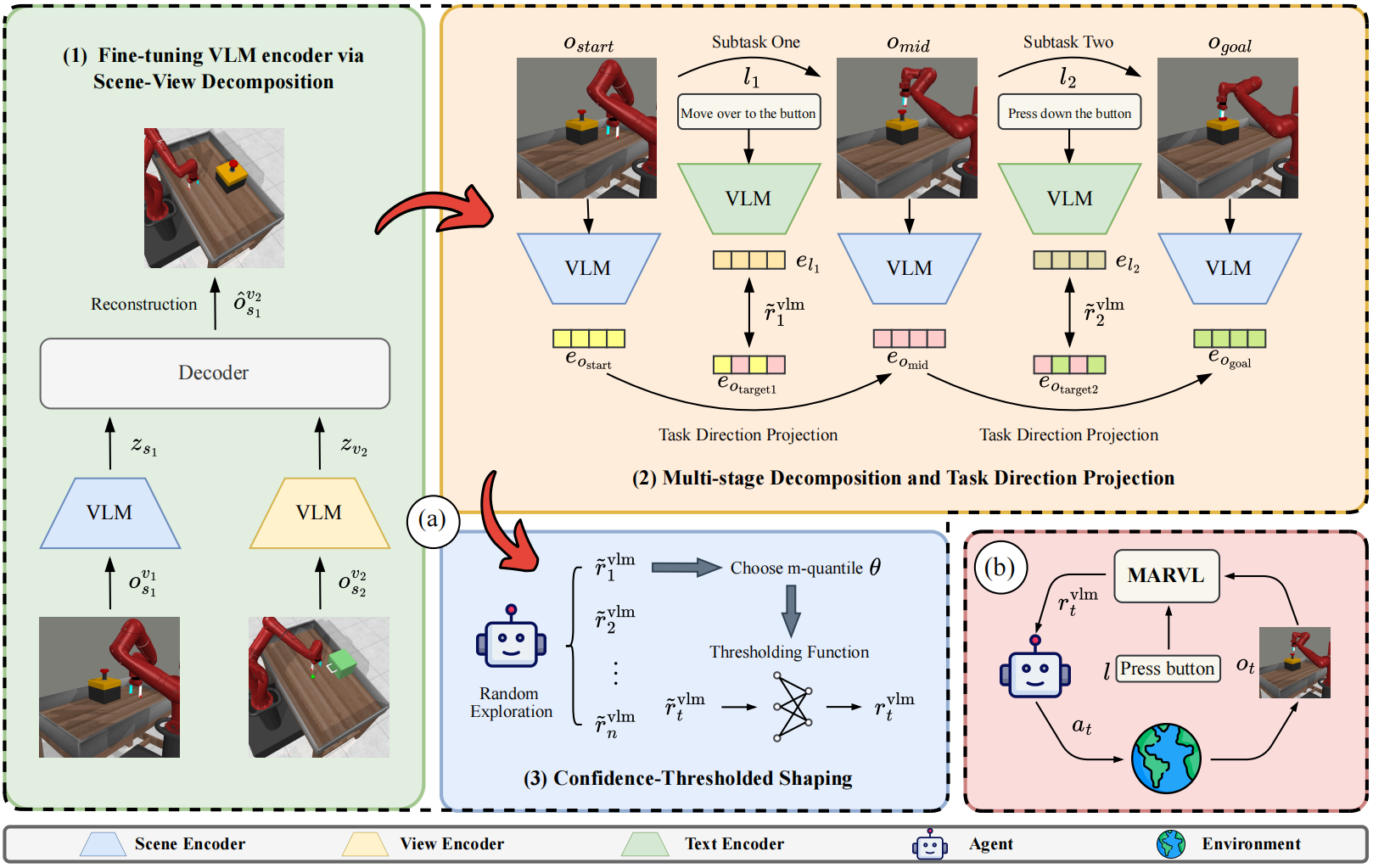
MARVL: Multi-Stage Guidance for Robotics Manipulation via Vision Language Models
Xunlan Zhou, Xuanlin Chen, Shaowei Zhang, Xiangkun Li, Shenghua Wan, Xiaohai Hu, Lei Yuan, Le Gan, De-Chuan Zhan
Preprint, 2026
MARVL fine-tunes a VLM for spatial and semantic consistency and decomposes tasks into multi-stage subtasks with task direction projection.
Iterative Youla-Kucera Loop Shaping For Precision Motion Control
Xiaohai Hu, Jason Laks, Guoxiao Guo, Xu Chen
IFAC-PapersOnLine, 2025; MECC 2025, Pittsburgh, PA
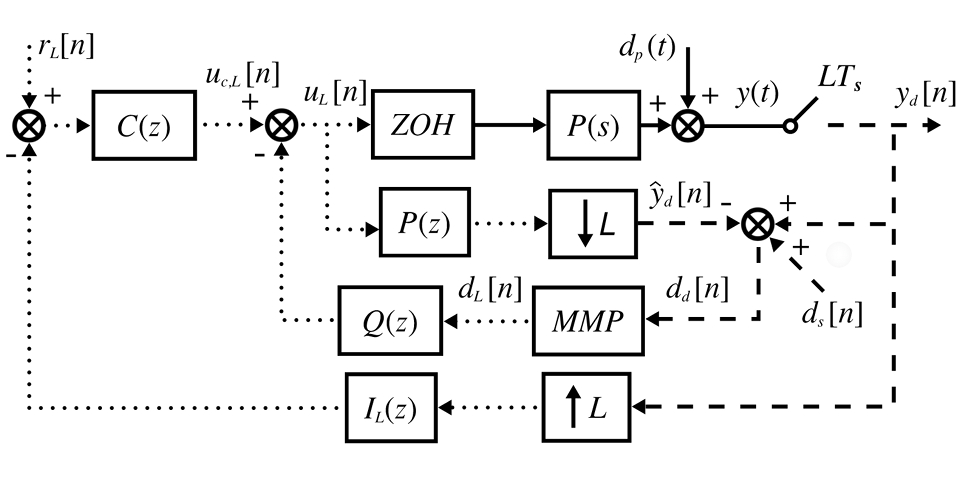
A numerically robust iterative Youla-Kucera parameterization for multi-band disturbance rejection, enabling precise loop shaping while minimizing waterbed amplifications. Validated on HDD servo systems for enhanced positioning precision.
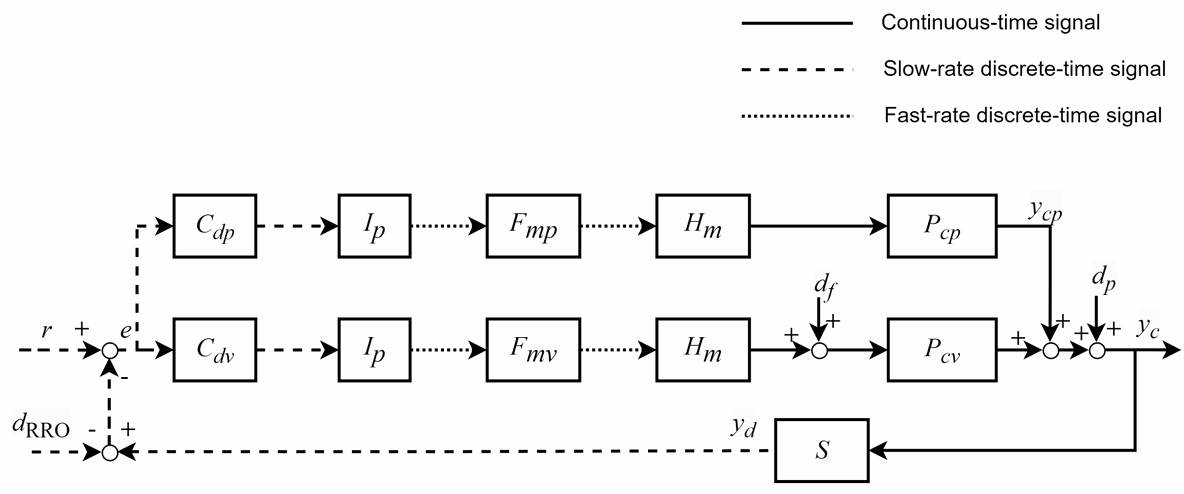
PyHDD Benchmark: A Python-Based Framework for Magnetic-Head Positioning Control Systems in Hard Disk Drives
Zidong Liu, Yusen Wan, Richard Lu, Amy Santoso, Xiaohai Hu, Thomas Chu, Tianyu Jiang, Guoxiao Guo, Takenori Atsumi, Xu Chen
IFAC World Congress, 2026, Busan, South Korea
The first Python-based open-source framework for simulating dual-stage actuator control in HDD servo systems with high-fidelity dynamics and multi-rate digital control.
2022: Featured in IEEE Spectrum - Chess Playing Robot
Fun Projects
MASt3R-SLAM Scene Reconstruction Real-time 3D scene reconstruction with humanoid robot wearing AR glasses for navigation
Chess-Playing Robot Chess Piece detection and manipulation
2018 Chinese Agricultural Robot Competition Apple harvesting robot demo
Mobile Manipulator Robot arm mounted on mobile base for manipulation tasks
Real-Time Whole-Body Teleoperation Humanoid robot control using general motion tracker
Misc: I hail from Jiangxi, China, with my formative years spent in Jingdezhen, a city globally acclaimed for its centuries-old tradition of crafting the finest porcelain.



 Google Scholar
Google Scholar